Two survey modes
to improve your efficiency
Never Wrong Vs. Fixed Priority
Tersus creatively provides two survey modes for users, never wrong (accuracy priority) and fixed priority. The never wrong (accuracy priority) mode guarantees the accuracy of customer’s survey points through strict threshold constraints, which is suitable for scenarios with high accuracy requirements such as RTK control survey; the fixed priority mode focuses on improving user measurement efficiency by seeking a balance between accuracy and the time required to get a fixed solution while satisfying the specification requirement of accuracy (RMS≤5cm). The Tersus R&D team controls the satellite searching status of the board through internal commands, including receiving different constellations, satellite altitude angles, signal-to-noise ratio satellites, and other forms by setting them to reproduce complex scenes such as half-sky, urban canyon, dense forest cover, and so on. And we statistically analyze the fixed speed and accuracy RMS values of never wrong VS fixed priority mode in the lab.
The following gives the actual measurement data of the half-sky scene, using Tersus Geobee30 base station, baseline distance of 15km, in the half-sky obscured scene, using GPGGA logging to identify the GNSS status identifier, count single RTK initialization from state 2 (code difference) to state 4 (fixed) duration, a total of 10 times initialization; at the same time, each time after completing RTK fixed, continuously observe 10 times, count and analyze the accuracy of survey points in a different mode. Figure 1 shows the comparison of the time required for fixation in the two modes;

You can see from Figure 2 that in the fixed priority mode, the plane mean square error is 1.98 cm, and the elevation mean square error is 2.03 cm;

From Figure 3, in the never wrong (accuracy priority) mode, the plane means the square error is 1.53 cm, and the elevation means the square error is 1.72 cm.

You can see that in this scenario, the average fixation speed of the fixed priority mode is increased by about 38% compared to the average fixation speed of the never wrong (accuracy priority) mode. At the same time, there is no significant decrease in the accuracy.
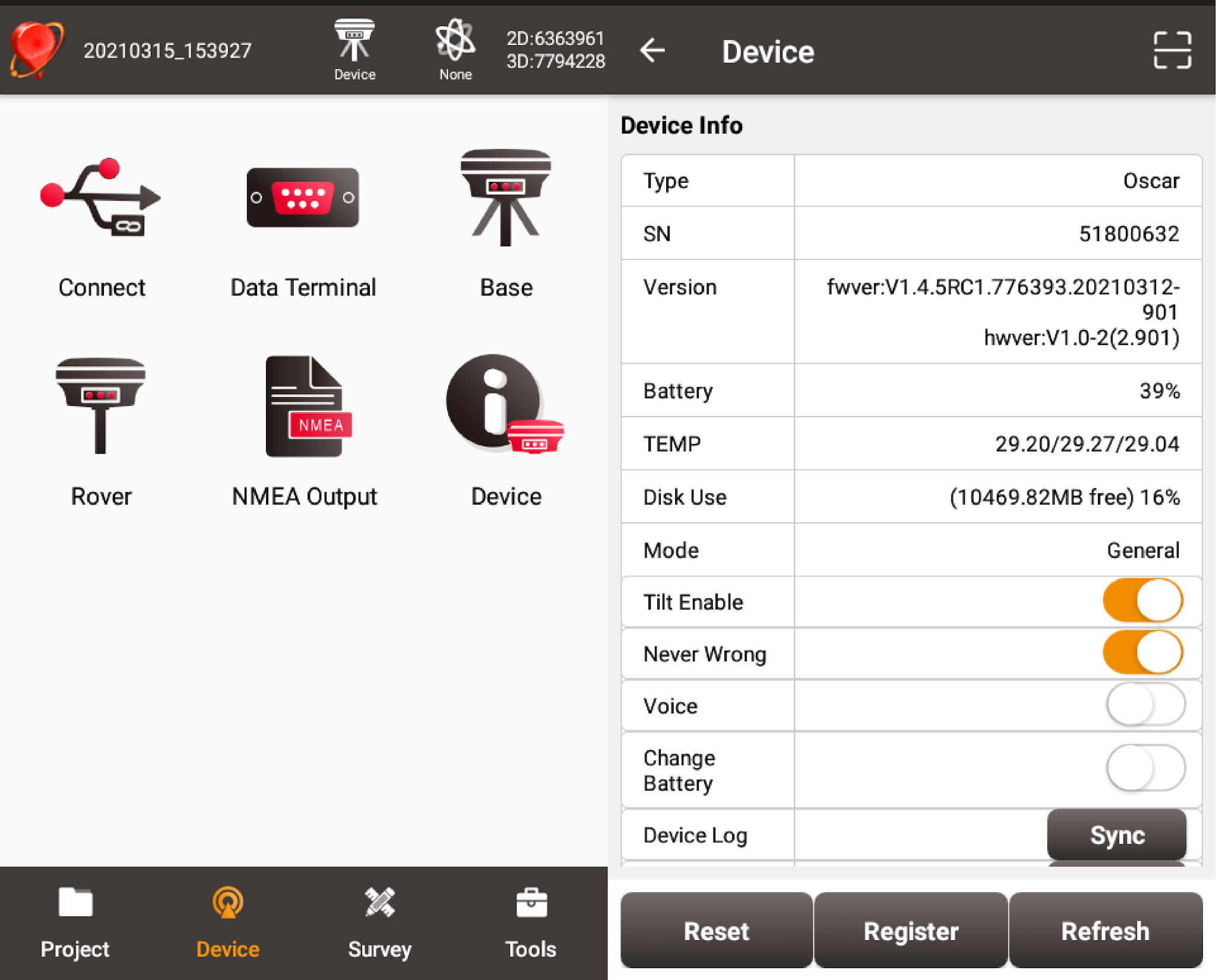
The two modes support hot-switching, so you can choose the survey mode you want at any time during the measurement. Just follow the steps below and use your fingers to configure it in the Nuwa app.
Comments
Post a Comment